|
Orolia Presents: GPS World Webinar – Resilient PNT for a 5G World
Panelists will discuss key factors for the successful implementation of 5G technology for 5G infrastructures, automotive, and mission critical applications:
- Testing requirements needed to ensure consistent operations
- Resilient Positioning, Navigation and Timing (PNT) technologies that can help ensure accurate, continuous operations for critical applications during interference or signal loss.
|
|
|
Which is the bigger problem? Risk assessment for PNT with Dana Goward
This webinar is part of the Resilient Positioning Navigation and Timing Seminar Series. Find out more about this series at: https://rin.org.uk/events/EventDetail... Presenter: Dana Goward, President & Director, Resilient Navigation and Timing Foundation
|
|
Assured-Positioning, Navigation and Timing (A-PNT)
YouTube search...
...Google search
Like the GPS units in many automobiles today, a simple receiver and some processing power is all that is needed for accurate navigation. But, what if the GPS satellites suddenly became unavailable due to malfunction, enemy action or simple interference, such as driving into a tunnel? Unavailability of GPS would be inconvenient for drivers on the road, but could be disastrous for military missions. Extreme Miniaturization: Seven Devices, One Chip to Navigate without GPS | US Defense Advanced Research Projects Agency (DARPA)
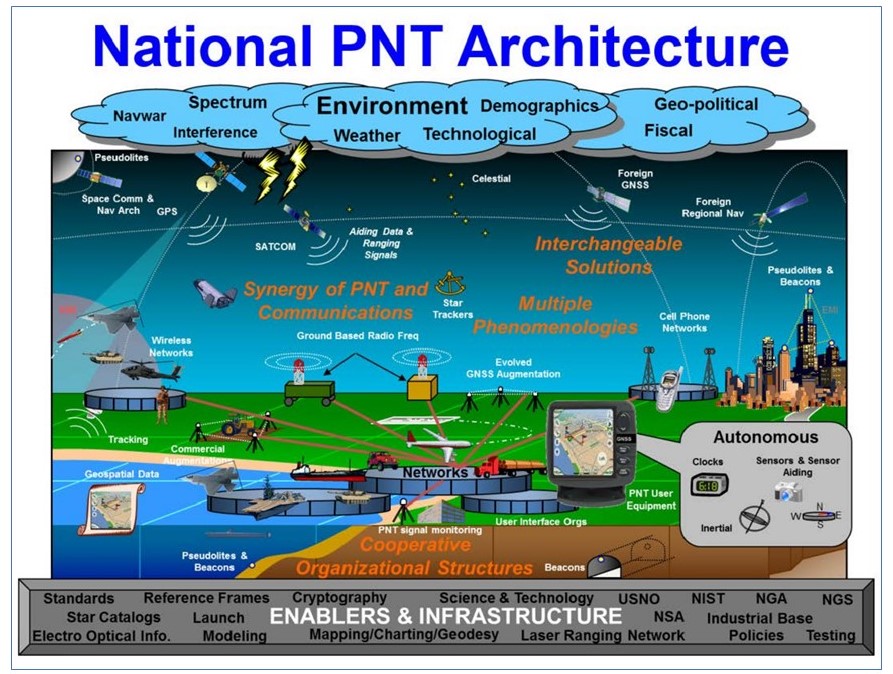
National Positioning, Navigation, and Timing (PNT) Architecture | U.S. Department of Transportation
|
System Performance and Resilience or: What could possibly go wrong? with Prof Marek Ziebart
Royal Institute of Navigation. Presenter: Prof Marek Ziebart, Director, Space Geodesy and Navigation Group, University College London Website: https://rin.org.uk/
|
|
|
|
|
When GNSS fails, what will you do? - MarRINav!
Royal Institute of Navigation. This webinar, called 'When GNSS fails, what will you do? - MarRINav! ' features presentations and comments form Jonathan Turner (NLA Int.), Dr Alan Grant (GLA), and Dana Goward (RNTF). The webinar provides analysis and insights from Phase 1 of the Maritime Resilience and Integrity of Navigation (MarRINav) project. To download the full transcript of Jonathan's presentation please follow this link: https://rin.org.uk/resource/resmgr/fi... Many thanks to all co-sponsors of this webinar: Resilient Navigation and Timing Foundation, Institute of Navigation, GPS World, The Maritime Executive, and of course the MarRINav project. Website: https://rin.org.uk/
|
|
|
|
The Coming Revolution in MEMS Gyroscopes and MEMS Inertial Sensors
Wireless Integrated MicroSensing & Systems - WIMS2 Relevant for automotive robotic drone wearable applications.
|
|
|
Enabling the Next Generation of GPS Technology with Supercorrelation with Dr Ramsey Faragher
Royal Institute of Navigation. Focal Point Positioning have developed a new method for processing GNSS radio signals called Supercorrelation which dramatically improves the performance of the earliest stage of radio processing. The software update removes multipath interference at the correlator level, and provides the ability to determine signal arrival angle without adding any new hardware to a standard GNSS device. In this webinar Dr Ramsey Faragher, Founder/CEO of FocalPoint will explain how the technology works, will cover some of the challenges that FocalPoint have overcome in deploying it on very low cost platforms, and will show off the new capabilities that it unlocks. Website: https://rin.org.uk/
|
|
|
|
AgilLOC Global Navigation Satellite System (GNSS) Anti-Jamming and Spoofing Capability
AgilLOC Antenna Element Compact (AEC) & Resilient Time Source (RTS) provide assured access to Position, Navigation and Timing (PNT) information for mission-critical systems. AEC provides GNSS anti-jam capability under denied environment through adaptive nulling of interference sources. RTS provides add-on GNSS anti-spoof capability and timing resiliency to ensure the integrity of the GNSS.
|
|
|
GRCon20 - Software defined radio based Global Navigation Satellite System real time spoofing....
Software defined radio based Global Navigation Satellite System real time spoofing detection and cancellation Presented by Jean-Michel Friedt,, D. Rabus and G. Goavec-Merou at GNU Radio Conference 2020 https://gnuradio.org/grcon20 Global Navigation Satellite Systems (GNSS) -- most significantly the Global Positioning System (GPS) -- have become ubiquitous to most daily activities, from positioning and navigation to long range time synchronization or distributed energy production ("smart grid"). While initially developed as a military system hardly accessible to civilians, the advent of Software Defined Radio jamming and spoofing capabilities emphasize the low security of GNSS weak signals emitted from satellites orbiting the Earth 20000 km away. While a properly spoofing signal cannot be detected after a consumer-grade receiver has decoded the radiofrequency signal, addressing at the radiofrequency wave level the signal integrity provides the solution of identifying spoofing with all satellites appearing at the same direction of arrival. This classical beamforming analysis -- Controlled Reception Pattern Antenna (CRPA) with multiple antenna reception and phase analysis -- is demonstrated using commercial, off the shelf software defined radio platform receivers (Ettus Research B210) running the real-time GNSS decoder gnss-sdr based on GNU Radio running on embedded boards such as the Raspberry Pi4.
|
|
|
|
PULP-DroNet -- Autonomous Artificial Intelligence-powered Nano-Drone
PULP-DroNet is a Deep Learning-powered visual navigation engine that enables autonomous navigation of a pocket-size quadrotor in a previously unseen environment.
Thanks to PULP-DroNet the nano-drone can explore the environment, avoiding collisions also with dynamic obstacles, in complete autonomy -- no human operator, no ad-hoc external signals, and no remote laptop! This means that all the complex computations are done directly aboard the vehicle and very fast. The visual navigation engine is composed of both a software and a hardware part. The former is based on the previous DroNet [1] project developed by the RPG [2] from the University of Zürich (UZH). DroNet is a shallow convolutional neural network (CNN) which has been used to control a standard-size quadrotor in a set of environments via remote computation. The hardware soul of PULP-DroNet is embodied by the PULP-Shield an ultra-low power visual navigation module featuring a Parallel Ultra-Low-Power (PULP) GAP8 System-on-Chip (SoC) from GreenWaves Technologies [3], an ultra-low power camera, and off-chip Flash/DRAM memory; the shield is designed as a pluggable PCB for the Crazyflie 2.0 [4] nano-drone. Then, we developed a general methodology for deploying state-of-the-art Deep Learning algorithms on top of ultra-low power embedded computation nodes, like a miniaturized drone. Our novel methodology allowed us first to deploy DroNet on the PULP-Shield, and then demonstrating how it enables the execution the CNN on board the CrazyFlie 2.0 within only 64-284mW and with a throughput of 6-18 frame-per-second! Finally, we field-prove our methodology presenting a closed-loop fully working demonstration of vision-driven autonomous navigation relying only on onboard resources, and within an ultra-low power budget. We release here, as open source, all our code, hardware designs, datasets, and trained networks. Reference: D. Palossi, F. Conti, and L. Benini An Open Source and Open Hardware Deep Learning-powered Visual Navigation Engine for Autonomous Nano-UAVs Preprint: https://arxiv.org/abs/1905.04166 PULP-Platform Project Webpage: https://www.pulp-platform.org/
|
|
|
GPS Spoofing and Jamming: Learn how to protect against threats to GNSS systems
Steatite
|
|
|
|
Securing Positioning & Timing 7: Improving Performance by Augmenting GPS/GNSS
Royal Institute of Navigation. The seventh, and final, of a series of webinars from the Securing Positioning & Timing short course. This webinar covers Improving Performance by Augmenting GPS/GNSS. Presented by Prof Terry Moore. Supported by the UK Space Agency. Website: https://rin.org.uk/
|
|
|
Assess performance & reduce risks across a multisensor, multi-system integration with Peter Rylands
Royal Institute of Navigation. Presenter: Peter Rylands, Product Manager, Oxford Technical Solutions Ltd
|
|
|
|
Resilient PNT for Unmanned Systems
Orolia. Demand for unmanned systems is growing exponentially across defense and civil/commercial organizations, for applications ranging from military missions and intelligence surveillance to border security and precision agriculture.
Resilient Positioning, Navigation and Timing (PNT) data and GPS/GNSS signals are critical for unmanned systems in order to successfully pilot and control aircraft, vehicle and vessel onboard systems.
|
|
Something is jamming GPS over Europe...
Geolocation: Locating GPS/GNSS Jamming and Spoofing
YouTube search...
...Google search
|
Securing Positioning & Timing 3: Detecting and Characterising GPS/GNSS Jamming & Spoofing
Royal Institute of Navigation. The third of a series of webinars from the Securing Positioning & Timing short course. This webinar covers Detecting and Characterising GPS/GNSS Jamming & Spoofing. Presented by Dr Mark Dumville. Supported by the UK Space Agency. Website: https://rin.org.uk/
|
|
|
|
Securing Positioning & Timing 4: Locating GPS/GNSS Jamming and Spoofing
Royal Institute of Navigation. The fourth of a series of webinars from the Securing Positioning & Timing short course. This webinar covers Locating GPS/GNSS Jamming and Spoofing. Presented by Mike Jones. Supported by the UK Space Agency. Website: https://rin.org.uk/
|
|
|
GNSS Jamming - Crowd Sourcing Detection and Geolocation
GNSS Jamming - Crowd Sourcing Detection and Geolocation webinar by InsideGNSS
|
|
|
|
Harris Corporation - Detect and Locate GPS Jamming with Signal Sentry™ 1000
Harris Corporation The Global Positioning System—GPS—is an essential element of the global information infrastructure. GPS jamming devices are becoming cheaper and more accessible, creating a greater need to protect from a diverse range of threats. Harris Signal Sentry 1000 is a GPS interference detection and geolocation solution. It provides a web-based visualization tool to support timely and effective actionable intelligence.
|
|
|
Why isn’t my GPS receiver consistently more accurate? with John Pottle
Royal Institute of Navigation. Presenter: John Pottle, Director of the RIN Website: https://rin.org.uk/
|
|
|
|
Current threats to GNSS: An update of incidents and impacts with Guy Buesnel
Royal Institute of Navigation. Presenter: Guy Buesnel, PNT Security Technologist Spirent Communications plc. Website: https://rin.org.uk/
|
|
Software-defined Global Navigation Satellite Systems (GNSS)
YouTube search...
...Google search
|
Dr. Carles Fernandez: An Open Source Global Navigation Satellite Systems Software-Defined Receiver
Software Defined Radio Academy GNSS-SDR (see https://gnss-sdr.org) is an open source, software-defined Global Navigation Satellite Systems (GNSS) receiver. This software application takes care of all the digital signal processing chain (from the output of the Analog-to-Digital Converter of a radio-frequency front-end, or from raw sam- ples stored in a file), performing signal acquisition and tracking of the available satellite signals, decoding the navigation message and computing the observables needed by positioning algorithms, which ultimately compute the navigation solution. Several outputs are provided in standard formats, including RINEX observation and navigation files, RTCM-104 v3.2 message streaming via TCP/IP and NMEA-0183, as well as KML, GeoJSON, and GPX files for Geographic Information Systems, map representation and Earth browsers. Currently, the software is able to process GLONASS L1 C/A, GPS L1 C/A, Galileo E1b/c, BeiDou B1I, BeiDou B3I, GLONASS L2 C/A, GPS L2C, GPS L5 and Galileo E5a signals, in all possible combinations, including multi-constellation and multi-frequency configurations. The software leverages on the GNU Radio framework, inheriting multithreading scheduling and a modular, scalable architecture. The software is designed to facilitate the inclusion of new signal processing techniques, offering an easy way to measure their impact in the overall receiver performance under fair conditions, as well as the expansion to other signals.
|
|
|
|
GRCon20 - Software defined radio based Global Navigation Satellite System real time spoofing....
Software defined radio based Global Navigation Satellite System real time spoofing detection and cancellation Presented by Jean-Michel Friedt,, D. Rabus and G. Goavec-Merou at GNU Radio Conference 2020 https://gnuradio.org/grcon20 Global Navigation Satellite Systems (GNSS) -- most significantly the Global Positioning System (GPS) -- have become ubiquitous to most daily activities, from positioning and navigation to long range time synchronization or distributed energy production ("smart grid"). While initially developed as a military system hardly accessible to civilians, the advent of Software Defined Radio jamming and spoofing capabilities emphasize the low security of GNSS weak signals emitted from satellites orbiting the Earth 20000 km away. While a properly spoofing signal cannot be detected after a consumer-grade receiver has decoded the radiofrequency signal, addressing at the radiofrequency wave level the signal integrity provides the solution of identifying spoofing with all satellites appearing at the same direction of arrival. This classical beamforming analysis -- Controlled Reception Pattern Antenna (CRPA) with multiple antenna reception and phase analysis -- is demonstrated using commercial, off the shelf software defined radio platform receivers (Ettus Research B210) running the real-time GNSS decoder gnss-sdr based on GNU Radio running on embedded boards such as the Raspberry Pi4.
|
|
Long Range Navigation (LORAN)
YouTube search...
...Google search
|
BBC Click no GPS radio eLoran instead. Filmed at the Port of Felixstowe
BBC Click report at the Port of Felixstowe demonstrating the loss of GPS and using eLoran as an alternative
|
|
Quantum Sensors in Navigation
YouTube search...
...Google search
- Quantum
- UK Research and Innovation
- Review of Quantum Navigation | Donghui Feng - IOP Conference Series: Earth and Environmental Science
- Quantum Sensing Technology Growing Rapidly to Enable Ultra Sensitive Quantum RADARS, Imaging, and Navigation | Rajesh Uppal - International Defence Security & Technology
Typically, the performance of measurement devices is limited by deleterious effects such as thermal noise and vibration. Notable exceptions are atomic clocks, which operate very near their fundamental limits. Driving devices to their physical limits will open new application spaces critical to future DoD systems. Indeed, many defense-critical applications already require exceptionally precise time and frequency standards enabled only by atomic clocks. The Global Positioning System (GPS) and the internet are two key examples. Measurement systems based on atomic physics benefit from the exquisite properties of the atom. Among these are (a) precise frequency transitions, (b) the ability to initialize, control, and readout the atomic state and (c) environmental isolation. In addition, atomic properties are absolute, and do not “drift” over time. In this sense, atoms are self-calibrated, making them ideal for precision sensing. Quantum-Assisted Sensing and Readout (QuASAR) | US Defense Advanced Research Projects Agency (DARPA)
|
Quantum Sensors in Navigation with Roger McKinlay, George Shaw and Kai Bongs
Royal Institute of Navigation Co-hosted by the UK Quantum Technology Hub Sensors and Timing and the Royal Institute of Navigation Presenters: Professor Kai Bongs, Principal Investigator at the UK Quantum Technology Hub Sensors and Timing; Roger McKinlay, Challenge Director for Quantum Technologies, UK Research and Innovation; George Shaw, Principal Systems Engineer, General Lighthouse Authority In this trio of presentations Roger, George and Kai discuss quantum sensors in navigation... Roger covers systems considerations in PNT and vulnerabilities in GNSS, UK industry opportunities and IUK programmes George covers current maritime navigation challenges, the resilient PNT system-of-systems approach and opportunity for Quantum Sensor technology insertion Kai covers quantum Sensor developments towards navigation solutions Website: https://rin.org.uk/
|
|
|
|
Nanoscale Quantum Sensing - Prof. Jorg Wrachtrup
Bar-Ilan University Nanoscale Quantum Sensing - a lecture by Prof. Jorg Wrachtrup of the Institute for Quantum Science and Technology in Germany. This lecture was given during the conference QUEST - Quantum Entanglement Science & Technology, held by Bar-Ilan University's Physics Department in June 2017.
|
|
Spacetime
YouTube search...
...Google search
Spacetime is a mathematical model that fuses the three dimensions of space (length, width, height) and the single dimension of time into a single four-dimensional continuum.
Before the 20th century, scientists viewed space and time as completely separate entities. Space was a static stage where events occurred, and time was a constant, universal clock. Albert Einstein and mathematician Hermann Minkowski revolutionized this view by proving they are inextricably linked.
Spacetime Core Concept: The Fabric of the Universe
In physics, every occurrence is an "event" located at a specific point in spacetime, described by four coordinates:
- <math>(x, y, z, t)</math>
Imagine meeting a friend. To ensure you meet, you must provide a specific location (spatial coordinates) and a specific time (temporal coordinate). If you omit the time, the meeting cannot happen.
General Relativity: Gravity as Curvature
The most famous application of spacetime is in Einstein’s General Theory of Relativity.
- Newton's View: Gravity is an invisible force that pulls objects together.
- Einstein's View: Gravity is not a force; it is the curvature of spacetime.
Massive objects (like the Earth or Sun) warp the fabric of spacetime around them. Smaller objects (like the Moon or a satellite) do not "feel" a force pulling them; they are simply following the straightest possible path (a geodesic) along this curved surface.
Visualizing Spacetime: The Light Cone
Physicists often use Minkowski diagrams to visualize spacetime. In these graphs, time is usually plotted on the vertical axis and space on the horizontal axis.
- World Line: A line representing an object's path through time. Even if an object is stationary in space, it moves through time, creating a straight vertical world line.
- Light Cone: Since nothing can travel faster than light, light spreading out from a single event forms a "cone" shape in the diagram. Events inside this cone can affect one another (causality); events outside are effectively disconnected.
Key Implications
- Time dilation: Because space and time are linked, moving through space affects movement through time. The faster an object travels through space, the slower it moves through time relative to a stationary observer.
- No Universal "Now": There is no single clock for the universe. Two observers moving at different speeds or in different gravitational fields will disagree on when an event happened (Relativity of simultaneity).
Comparison Table
| Concept
|
Classical View (Newton)
|
Spacetime View (Einstein)
|
| Space
|
A static, rigid stage.
|
A flexible fabric that can bend and twist.
|
| Time
|
Universal and constant for everyone.
|
Relative; flows at different rates for different observers.
|
| Gravity
|
A force acting at a distance.
|
The curvature of the geometry of spacetime.
|
|
Time Does Not Exist. Let me explain with a graph.
How do we really move through spacetime? Sadly the books have sold out.
|
|
|
|
What Exactly is Spacetime? Explained in Ridiculously Simple Words
Spacetime, as a concept, is related to a space that consists of 4 dimensions instead of the regular 3-dimensional space. As early as 1905, Einstein proposed a now widely popular theory that the speed of light is independent of the motion of all observers, and that space and time are interconnected in a single continuum. This theory, which is now a cornerstone of modern and quantum physics, is known as Einstein’s special theory of relativity. Einstein's proposed idea of a single continuum where space and time are interwoven is what people call “space-time”.
According to this theory, time—which has traditionally been considered an independent entity according to the principles of classical physics—is affected when a body moves through space. This happens because, according to the theory, time and space are connected and part of a single continuum—spacetime.
In this video, we discuss spacetime in absolutely simple words: what exactly is spacetime and how is it related to the force of gravitation and Einstein’s theory of relativity?
|
|
|
This Is Why Time Might Not Actually Exist
Quantum Entanglement May Reveal a Reality We Can't Handle
|
|
|
|
Longitude
YouTube search...
...Google search
|
Longitude
Dava Sobel's book is a captivating story, such a good film with an impressive cast. What a genius Mr Harrison was. Such determination. A lesson to us all..
|
|
|
|
The Clock That Changed the World (BBC History of the World)
SciShow It’s time for another leap second! Join SciShow as we celebrate by exploring the long and strange history of timekeeping. Hosted by: Michael Aranda Dooblydoo thanks go to the following Patreon supporters -- we couldn't make SciShow without them! Shout out to Justin Ove, Justin Lentz, David Campos, John Szymakowski, Peso255, Jeremy Peng, Avi Yaschin, and Fatima Iqbal. Like SciShow? Want to help support us, and also get things to put on your walls, cover your torso and hold your liquids? Check out our awesome products over at DFTBA Records: https://dftba.com/scishow Or help support us by becoming our patron on Patreon: https://www.patreon.com/scishow
|
|
Natural Navigation
YouTube search...
...Google search
|
Henrik Mouritsen on How do migratory birds find their way?
Prof. Henrik Mouritsen (University of Oldenburg, Germany) on "How do migratory birds find their way?", at the FENS Hertie Winter School 2017 on Neural Control of Behaviour - Series 1: Navigation, 10-16 December 2017, Obergurgl, Austria.
|
|
|
|
Animal Navigation || Radcliffe Institute
Lizabeth Cohen 00:16 Dean, Radcliffe Institute for Advanced Study Howard Mumford Jones Professor of American Studies Department of History Harvard University John Huth 7:32 Donner Professor of Science
Codirector of the Science Program Radcliffe Institute for Advanced Study Harvard University ANIMAL NAVIGATION 16:50 Susanne Åkesson 19:53 Professor and Principal Investigator Centre for Animal Movement Research, Lund University (Sweden) Introduced by Scott Edwards 17:51 Professor of Organismic and Evolutionary Biology Curator of Ornithology Alexander Agassiz Professor of Zoology in the Museum of Comparative Zoology Harvard University
|
|
Molecular Clock
Scientists use the molecular clock, which assumes steady genetic changes, to estimate species divergence times, but recent models like the Covariant Evolutionary Tempo (CET) by Budd & Mann suggest evolution isn't always steady, predicting rapid bursts in major groups (like mammals or birds) early on, explaining mismatches with fossil records by showing faster initial evolution and diversification, thus refining our understanding of how large animal groups rapidly emerge.
How the Molecular Clock Works
- Rate of Mutation: The core idea is that mutations in DNA accumulate at a relatively constant rate over time.
- Genetic Differences: By comparing DNA or protein sequences between species, scientists count the genetic differences.
- Dating Divergence: More differences imply a longer time since the species shared a common ancestor, allowing estimation of evolutionary timelines.
Challenges & New Models (Budd & Mann's CET)
the Covariant Evolutionary Tempo model suggests that when a big group of organisms appear, evolution actually speeds up. This would make it appear like more time was passing when evolution was really on fast-forward, differentiating into various groups that eventually appeared in the fossil record. “While the speeding clock idea needs testing,” Telford wrote, “it could explain other mismatches between molecular clocks and the fossil record.”
- Fossil Record Mismatch: Molecular clocks sometimes suggest earlier origins for animal groups than the fossil record shows, creating a gap (e.g., the Cambrian explosion).
- The CET Model: This model proposes that when a major group starts to diversify, it experiences:
- Explosive Radiation: Rapid increases in species diversity.
- Elevated Molecular Rates: Faster rates of genetic change.
- Impact: This explains why fossil records show sudden appearances of major groups, as they truly did evolve and diversify quickly, rather than gradually over long periods, says this article from Uppsala University.
Significance
- Refined Timelines: The new models provide a more nuanced understanding of evolutionary history, reconciling molecular data with fossil evidence.
- Understanding Major Events: Helps explain rapid evolutionary events, like the emergence of mammals after dinosaur extinction, where a surviving lineage exploded in diversity.
- Connecting Disciplines: Bridges gaps between molecular biology, paleontology, and geology to build more accurate evolutionary trees.
Time Travel in Fiction
Time travel in science and fiction serves as a rich narrative tool to explore causality, free will, and the malleability of timelines. Scientific theories like wormholes, relativistic travel involving time dilation, and closed timelike curves provide plausible mechanisms explanation of how time travel functions. In different popular movies, books, & shows – not how it works “under the hood", but how it causally affects the perspective of characters’ timelines (who has free will? can you change things by going back to the past or forwards into the future?). In particular, I explain Ender's Game, Planet of the Apes, Harry Potter and the Prisoner of Azkaban, Primer, Bill & Ted’s Excellent Adventure, Back to the Future, Groundhog Day, Looper, the video game “Braid”, and Lifeline. Whether driven by science or narrative needs, these portrayals reflect how characters experience and manipulate time, raising questions about fate, agency, and the consequences of tampering with the past
Time & Music
YouTube search...
...Google search
|