Difference between revisions of "Markov Decision Process (MDP)"
| Line 14: | Line 14: | ||
** [[State-Action-Reward-State-Action (SARSA)]] | ** [[State-Action-Reward-State-Action (SARSA)]] | ||
** [[Deep Reinforcement Learning (DRL)]] DeepRL | ** [[Deep Reinforcement Learning (DRL)]] DeepRL | ||
| − | |||
** [[Distributed Deep Reinforcement Learning (DDRL)]] | ** [[Distributed Deep Reinforcement Learning (DDRL)]] | ||
** [[Deep Q Network (DQN)]] | ** [[Deep Q Network (DQN)]] | ||
** [[Evolutionary Computation / Genetic Algorithms]] | ** [[Evolutionary Computation / Genetic Algorithms]] | ||
| − | ** [[ | + | ** [[Actor Critic]] |
** [[Hierarchical Reinforcement Learning (HRL)]] | ** [[Hierarchical Reinforcement Learning (HRL)]] | ||
| − | |||
** [[MERLIN]] | ** [[MERLIN]] | ||
Revision as of 17:54, 1 September 2019
Youtube search... ...Google search
- Markov Model (Chain, Discrete Time, Continuous Time, Hidden)
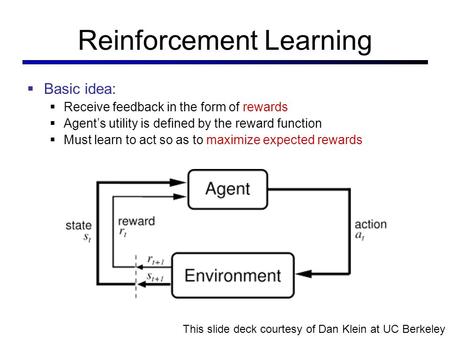
- Reinforcement Learning (RL)
- Monte Carlo (MC) Method - Model Free Reinforcement Learning
- Q Learning
- State-Action-Reward-State-Action (SARSA)
- Deep Reinforcement Learning (DRL) DeepRL
- Distributed Deep Reinforcement Learning (DDRL)
- Deep Q Network (DQN)
- Evolutionary Computation / Genetic Algorithms
- Actor Critic
- Hierarchical Reinforcement Learning (HRL)
- MERLIN

Solutions:
Used where outcomes are partly random and partly under the control of a decision maker. MDP is a discrete time stochastic control process. At each time step, the process is in some state s, and the decision maker may choose any action a that is available in state s. The process responds at the next time step by randomly moving into a new state s', and giving the decision maker a corresponding reward R_{a}(s,s')} R_a(s,s'). The probability that the process moves into its new state s' is influenced by the chosen action. Helping the convergence of certain algorithms a discount rate (factor) makes an infinite sum finite.