Difference between revisions of "Point Cloud"
m |
m |
||
| Line 18: | Line 18: | ||
* [[Robotics]] ... [[Transportation (Autonomous Vehicles)|Vehicles]] ... [[Autonomous Drones|Drones]] ... [[3D Model]] ... [[Point Cloud]] | * [[Robotics]] ... [[Transportation (Autonomous Vehicles)|Vehicles]] ... [[Autonomous Drones|Drones]] ... [[3D Model]] ... [[Point Cloud]] | ||
| − | * [[Simulation]] ... [[Simulated Environment Learning]] | + | * [[Simulation]] ... [[Simulated Environment Learning]] ... [[Minecraft]]: [[Minecraft#Voyager|Voyager]] |
** [[3D Model#3DCNN | 3DCNN]] | ** [[3D Model#3DCNN | 3DCNN]] | ||
* [[Hyperdimensional Computing (HDC)]] | * [[Hyperdimensional Computing (HDC)]] | ||
Revision as of 08:17, 16 June 2024
Youtube search... ...Google search
- Robotics ... Vehicles ... Drones ... 3D Model ... Point Cloud
- Simulation ... Simulated Environment Learning ... Minecraft: Voyager
- Hyperdimensional Computing (HDC)
- Deep learning with point clouds | Romain Thalineau - qwertee.io
- RS-CNN: Relation-Shape Convolutional Neural Network for Point Cloud Analysis | Y. Liu, B. Fin, S. Xiang, and C. Pan - University of Chinese Academy of Sciences
- Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.
- Cybersecurity ... OSINT ... Frameworks ... References ... Offense ... NIST ... DHS ... Screening ... Law Enforcement ... Government ... Defense ... Lifecycle Integration ... Products ... Evaluating
- Graph Convolutional Network (GCN), Graph Neural Networks (Graph Nets), Geometric Deep Learning
- Common 3D point cloud file formats & solving interoperability issues | Charles Thomson - Vercator
A point cloud is a set of data points in space. Point clouds are generally produced by 3D scanners, which measure a large number of points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D CAD models for manufactured parts, for metrology and quality inspection, and for a multitude of visualization, animation, rendering and mass customization applications. [A point cloud is a set of data points in space. Point clouds are generally produced by 3D scanners, which measure a large number of points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D CAD models for manufactured parts, for metrology and quality inspection, and for a multitude of visualization, animation, rendering and mass customization applications. Point Cloud and List of programs for Point Cloud processing | Wikipedia
Although Convolutional Neural Networks are the state of the art techniques for 2D object detection, they do not perform well on 3D point cloud due to the sparse sensor data, therefore new techniques are needed. 3D Object Detection from LiDAR Data with Deep Learning | SmartLab AI - Medium
Contents
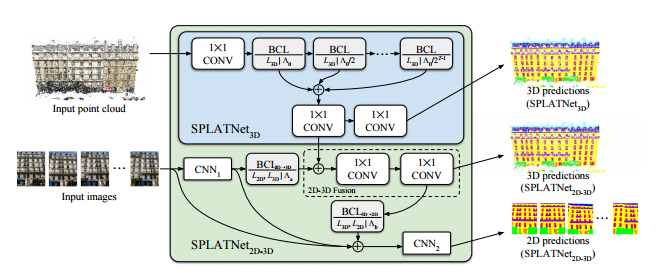
SPLATNet
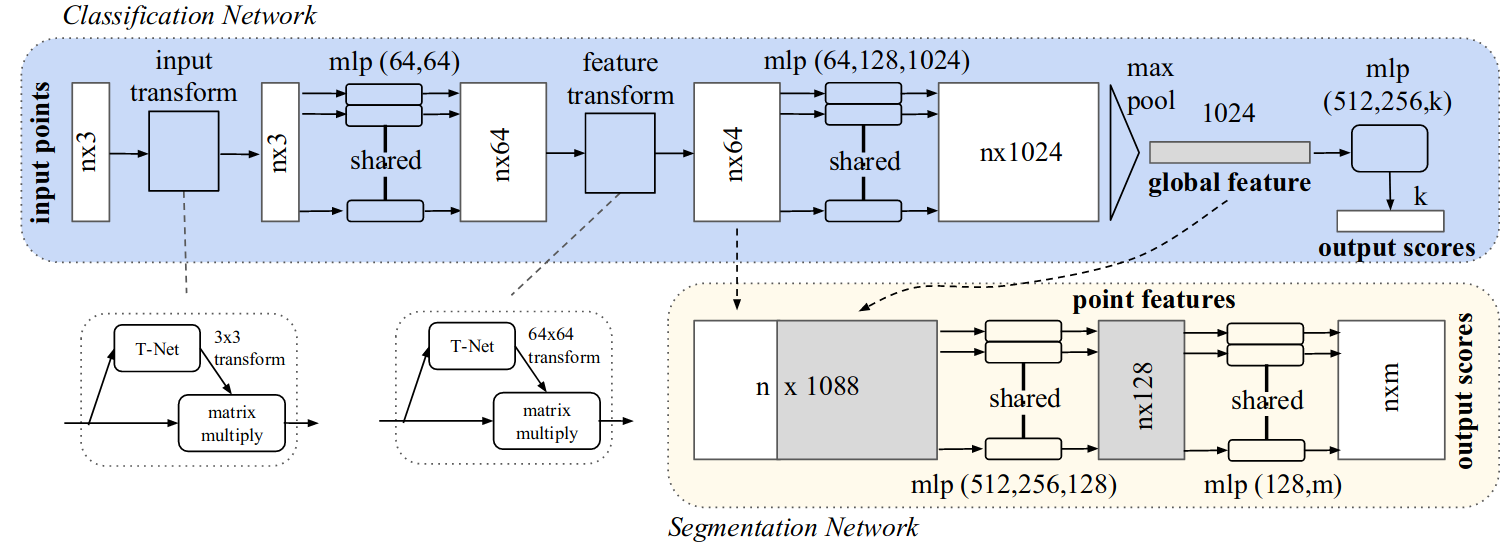
PointNet
- PointNet | C. Qi, H. Su, K. Mo, and L. Guibas - Stanford -GitHub deep learning on point sets for 3D classification and segmentation
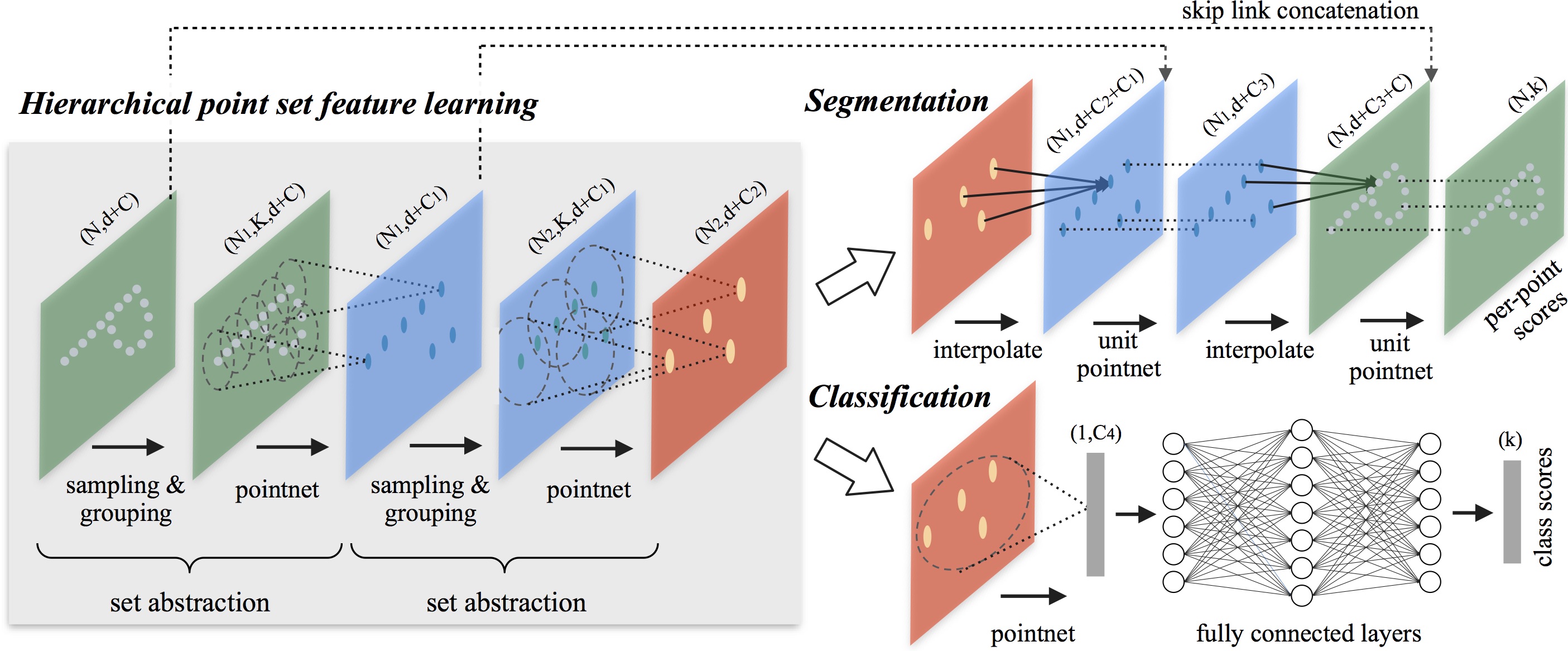
- PointNet++: deep hierarchical feature learning on point sets in a metric space | C. Qi, L. Yi, H. Su, and L. Guibas - Stanford
Vote3Deep
Point-GNN
a graph neural network to detect objects from a LiDAR point cloud. Towards this end, we encode the point cloud efficiently in a fixed radius near-neighbors graph. We design a graph neural network, named Point-GNN, to predict the category and shape of the object that each vertex in the graph belongs to. In Point-GNN, we propose an auto-registration mechanism to reduce translation variance, and also design a box merging and scoring operation to combine detections from multiple vertices accurately. Our experiments on the KITTI benchmark show the proposed approach achieves leading accuracy using the point cloud alone and can even surpass fusion-based algorithms. Our results demonstrate the potential of using the graph neural network as a new approach for 3D object detection. | Weijing Shi and Raj Rajkumar - GitHub
SqueezeSeg
Neural Point-Based Graphics
Kd-Networks
- Escape from Cells: Deep Kd-Networks for the Recognition of 3D Point Cloud Models | Roman Klokov and Victor Lempitsky ... GitHub This code uses python2.7 with theano(0.9.0) installed over Cuda8.0 with CuDNN5.1 and Lasagne(0.2.dev1).
Vote3Deep
Fast Object Detection in 3D Point Clouds Using Efficient Convolutional Neural Networks
3D Point Cloud Classification, Segmentation and Normal estimation
using Modified Fisher Vector and CNNs
- [http://arxiv.org/pdf/1711.08241.pdf 3DmFV: Three-Dimensional Point Cloud Classification in Real-Time Using Convolutional Neural Networks | Y. Ben-Shabat, M. Lindenbaum, and A. Fischer
Modified Fisher Vector (3DmFV)