Difference between revisions of "Point Cloud"
| Line 68: | Line 68: | ||
== 3D Point Cloud Classification, Segmentation and Normal estimation == | == 3D Point Cloud Classification, Segmentation and Normal estimation == | ||
| − | using Modified Fisher Vector and | + | using Modified Fisher Vector and [[(Deep) Convolutional Neural Network (DCNN/CNN)|CNN]]s |
<youtube>PSVmTDzXPpc</youtube> | <youtube>PSVmTDzXPpc</youtube> | ||
| + | |||
| + | == Modified Fisher Vector (3DMFV) == | ||
| + | * [http://www.itzikbs.com/what-is-3d-modified-fisher-vector-3dmfv-representation-for-3d-point-clouds What Is 3D Modified Fisher Vector (3DMFV) Representation For 3D Point Clouds | Itzik Ben Shabat] | ||
| + | |||
| + | https://i1.wp.com/www.itzikbs.com/wp-content/uploads/2018/09/3d_fv_smaller-compressor.gif?resize=350%2C329 | ||
Revision as of 16:34, 30 July 2020
Youtube search... ...Google search
- Deep learning with point clouds | Romain Thalineau - qwertee.io
- RS-CNN: Relation-Shape Convolutional Neural Network for Point Cloud Analysis | Y. Liu, B. Fin, S. Xiang, and C. Pan - University of Chinese Academy of Sciences
- Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.
- Screening; Passenger, Luggage, & Cargo
- 3D Model e.g. 3DCNN
- Graph Convolutional Network (GCN), Graph Neural Networks (Graph Nets), Geometric Deep Learning
- Common 3D point cloud file formats & solving interoperability issues | Charles Thomson - Vercator
A point cloud is a set of data points in space. Point clouds are generally produced by 3D scanners, which measure a large number of points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D CAD models for manufactured parts, for metrology and quality inspection, and for a multitude of visualization, animation, rendering and mass customization applications. [A point cloud is a set of data points in space. Point clouds are generally produced by 3D scanners, which measure a large number of points on the external surfaces of objects around them. As the output of 3D scanning processes, point clouds are used for many purposes, including to create 3D CAD models for manufactured parts, for metrology and quality inspection, and for a multitude of visualization, animation, rendering and mass customization applications. Point Cloud and List of programs for Point Cloud processing | Wikipedia
Although Convolutional Neural Networks are the state of the art techniques for 2D object detection, they do not perform well on 3D point cloud due to the sparse sensor data, therefore new techniques are needed. 3D Object Detection from LiDAR Data with Deep Learning | SmartLab AI - Medium
Contents
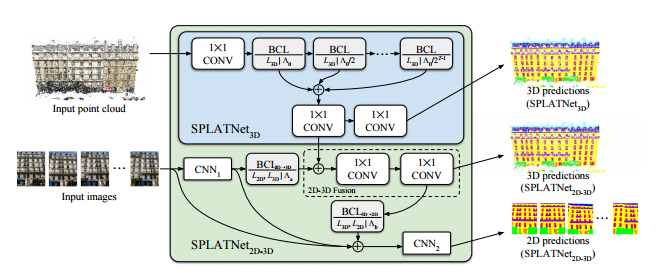
SPLATNet
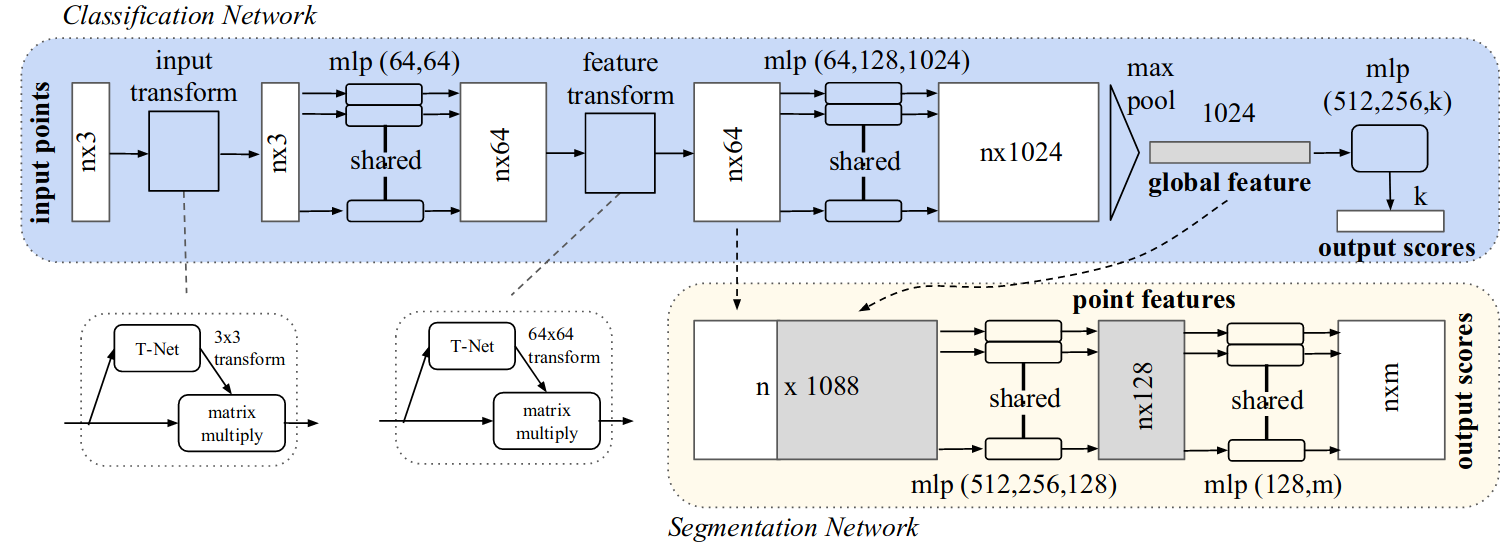
PointNet
- PointNet | C. Qi, H. Su, K. Mo, and L. Guibas - Stanford -GitHub deep learning on point sets for 3D classification and segmentation
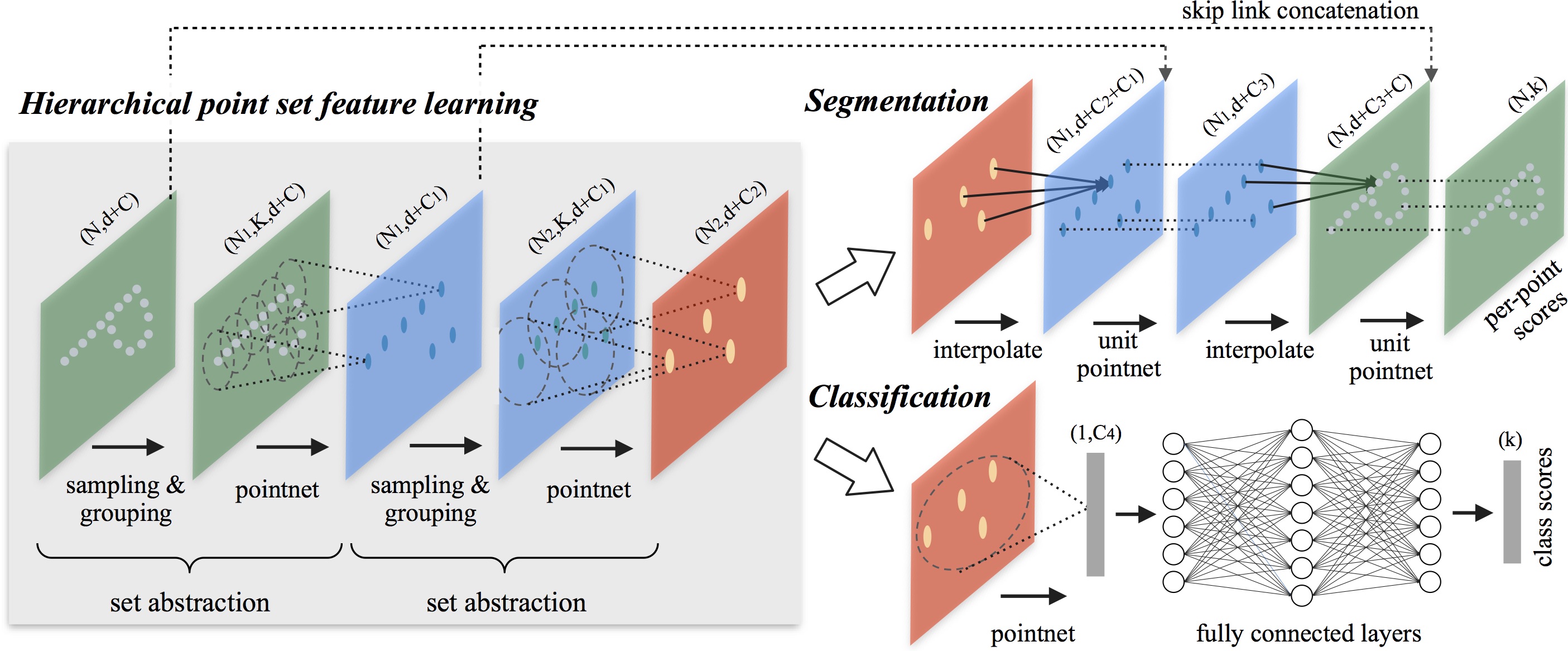
- PointNet++: deep hierarchical feature learning on point sets in a metric space | C. Qi, L. Yi, H. Su, and L. Guibas - Stanford
Vote3Deep
SqueezeSeg
Neural Point-Based Graphics
Vote3Deep
Fast Object Detection in 3D Point Clouds Using Efficient Convolutional Neural Networks
3D Point Cloud Classification, Segmentation and Normal estimation
using Modified Fisher Vector and CNNs